

Сопутствующая учебная техника и пособия:

Описание
Демонстрационная виртуальная среда (далее ДВС) предназначена для демонстрации типовой конструкции, устройства и работы основных блоков радиолокационных станций, формирования и обработки радиолокационных сигналов.
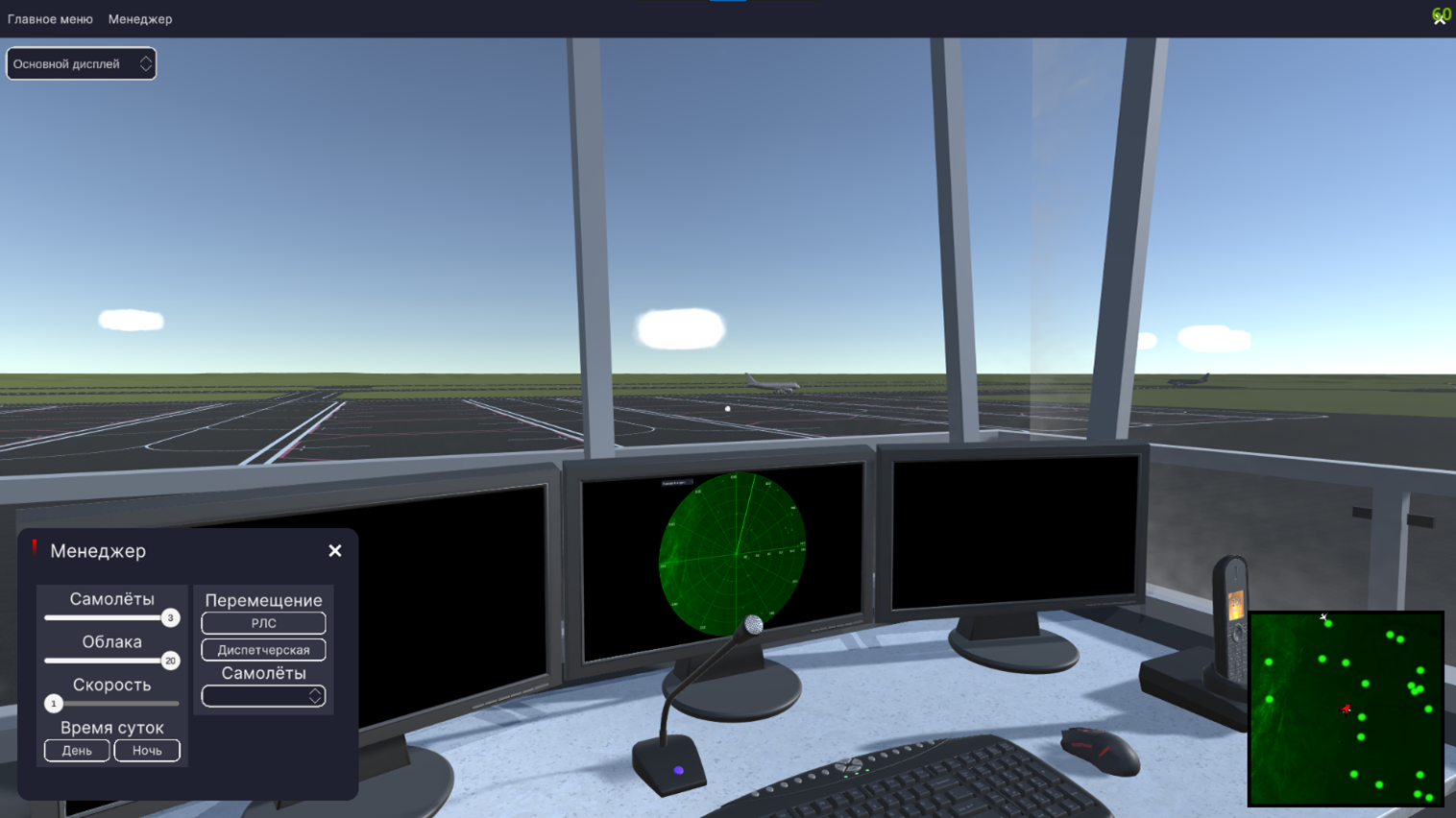
ДВС позволяет обучаемому в интерактивном режиме ознакомиться с типовой конструкцией первичной РЛС, базовыми блоками, из которых она состоит, и сигналами на границах этих блоков на графиках, побывать в рубке диспетчера в аэропорту, пронаблюдать передвижение целей на индикаторе кругового обзора РЛС (ИКО).
Диспетчерская вышка в аэропорту
Функциональность
• Моделирование зондирующего ЛЧМ сигнала в РЛС.
• Моделирование отраженного сигнала от реальных целей.
• Моделирование обработки сигнала по методу «свертки» ЛЧМ сигнала для детектирования целей.
• Визуализация сигналов РЛС на графиках.
• Визуализация устройства в 3D РЛС, глиссадного и курсового маяков.
• Моделирование местности в пределах работы РЛС.
• Изменение погодных условий местности (облачность) и времени дня.
• Моделирование поведения воздушных судов на местности с отображением на РЛС.
• Изменение количества воздушных судов.
• Быстрое перемещение по всей локации (нажатием на любую позиции на ИКО РЛС).
Перечень виртуальный моделей
• Международный аэропорт Челябинска:
o Диспетчерская рубка.
o Радиолокационная станция (РЛС).
o Взлетно-посадочные полосы.
o Глиссадный радиомаяк.
o Курсовой радиомаяк.
• Реальный рельеф местности Челябинской области 240х240 км (в центре аэропорт).
• Пассажирский самолет.
• Облака.
Скриншоты
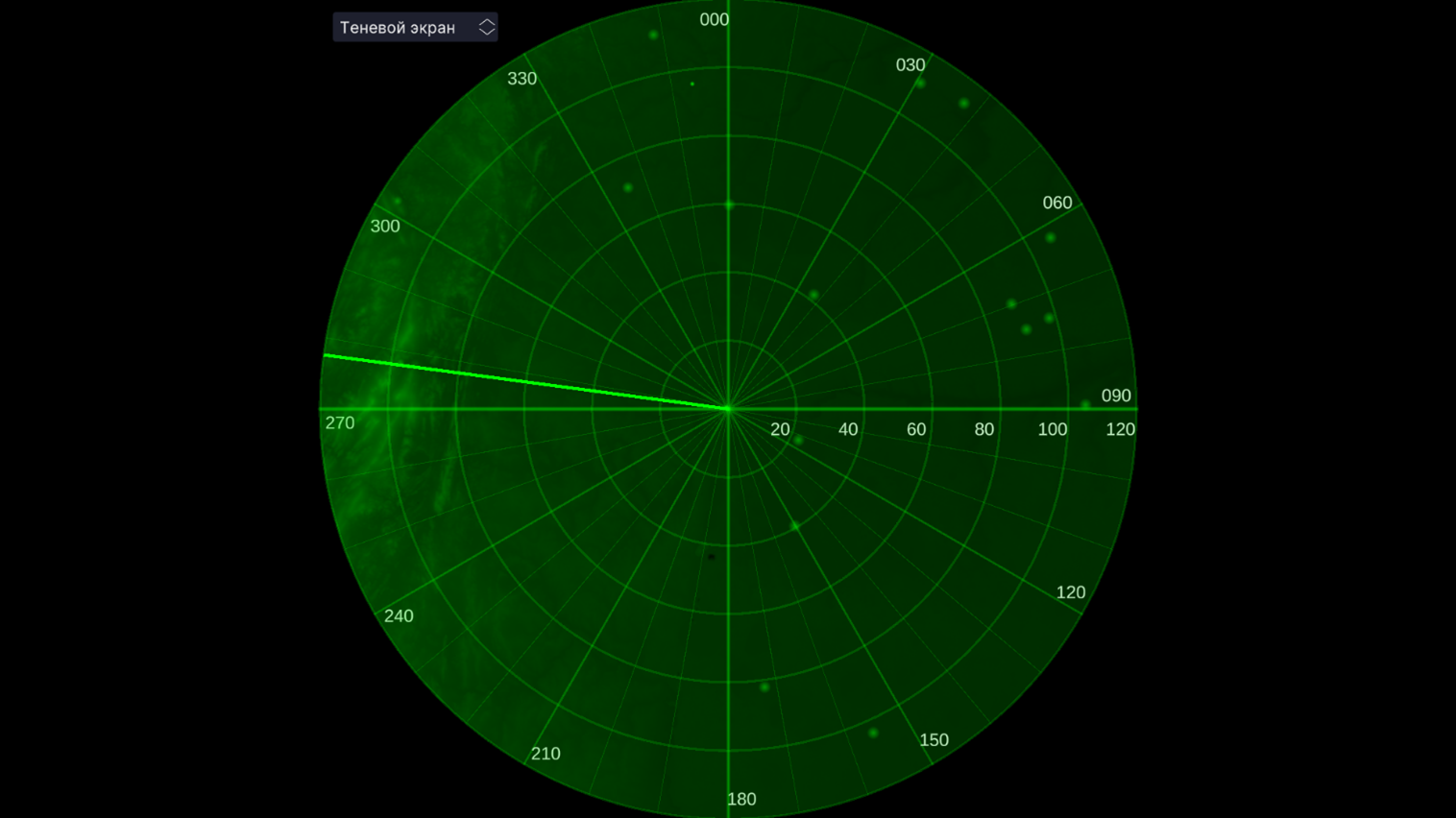
Индикатор кругового обзора – необработанные данные, теневой экран
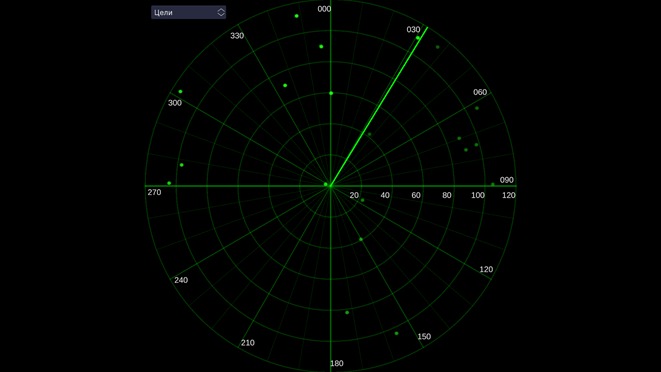
Индикатор кругового обзора – селекция движущихся целей
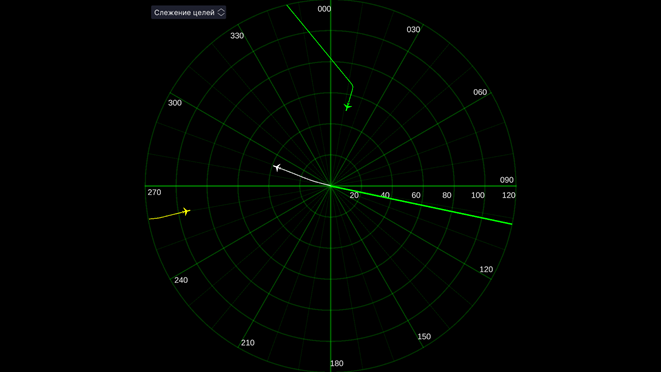
Индикатор кругового обзора – отслеживание воздушных бортов
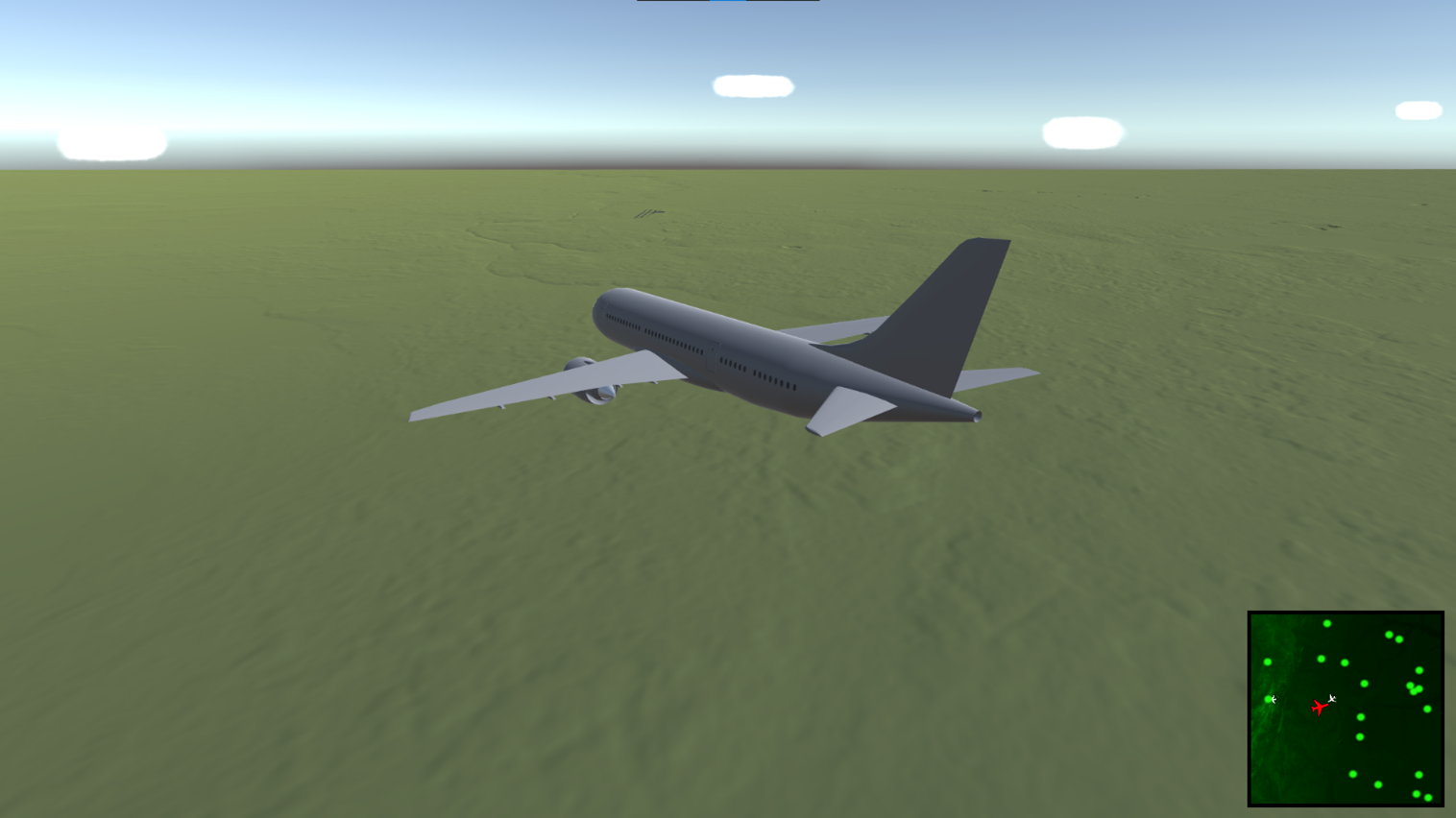
Перемещение воздушного борта по маршруту
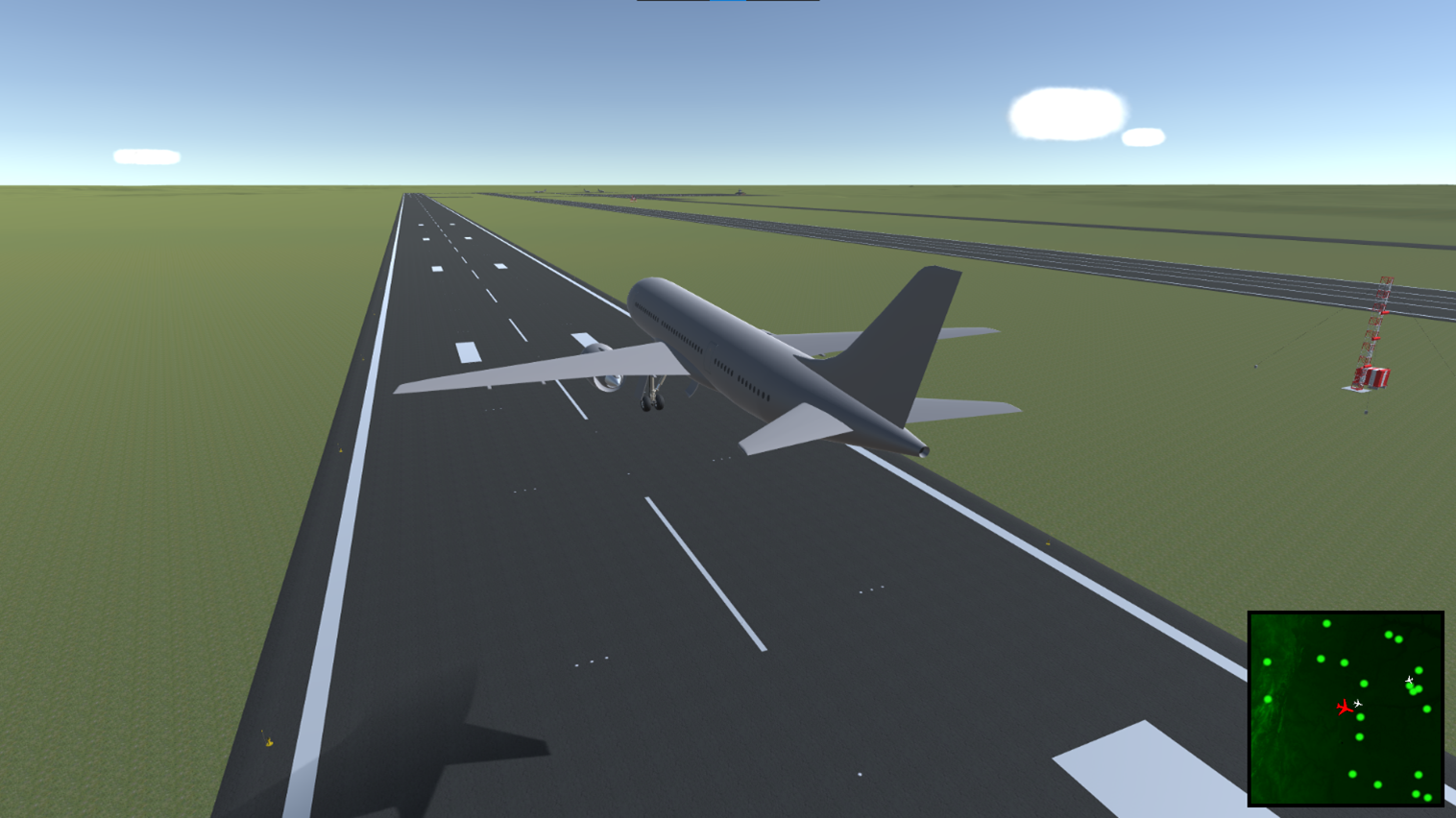
Посадка воздушного борта
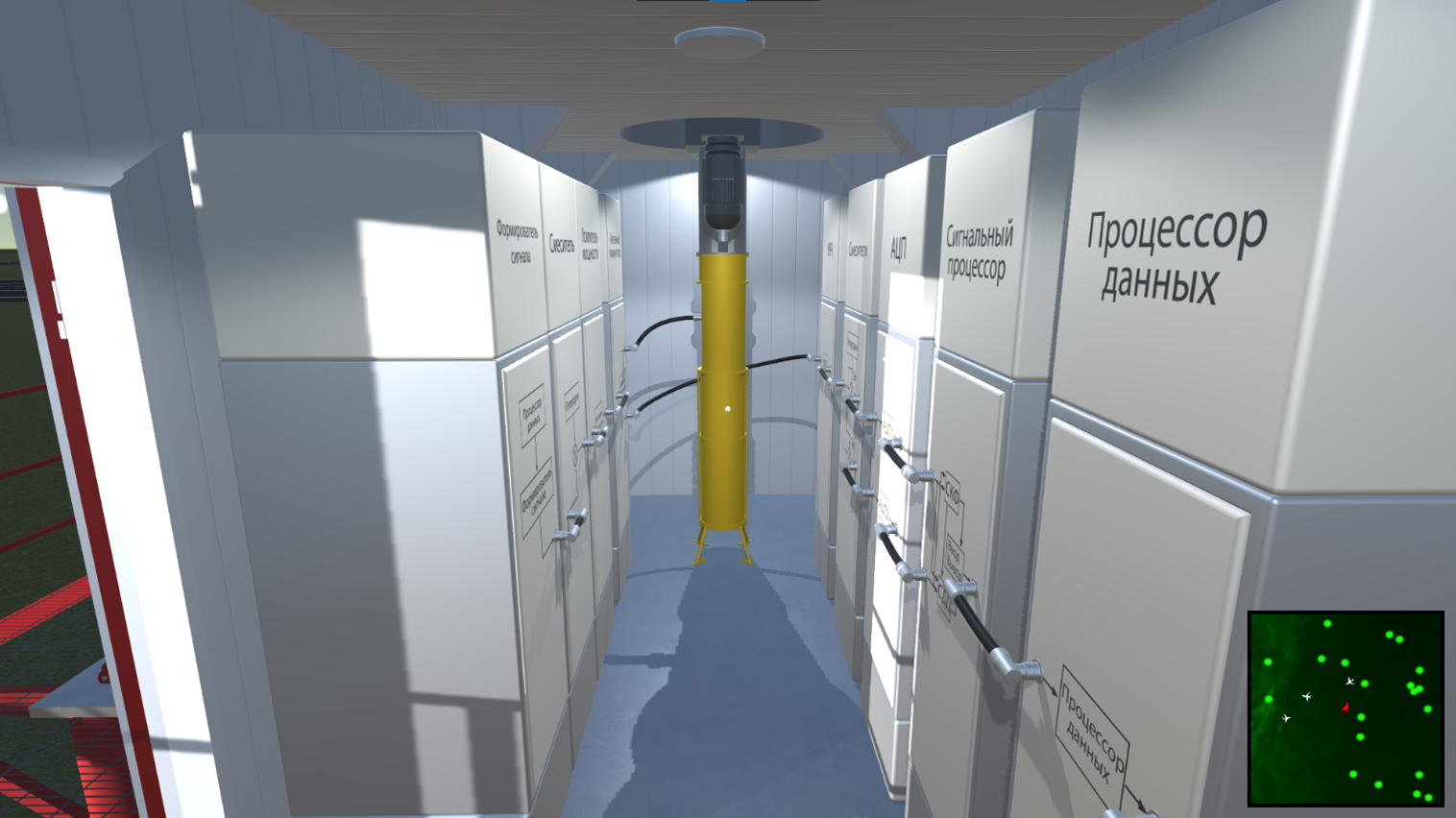
Устройство РЛС внутри с возможностью просмотра обрабатываемых сигналов на разных этапах
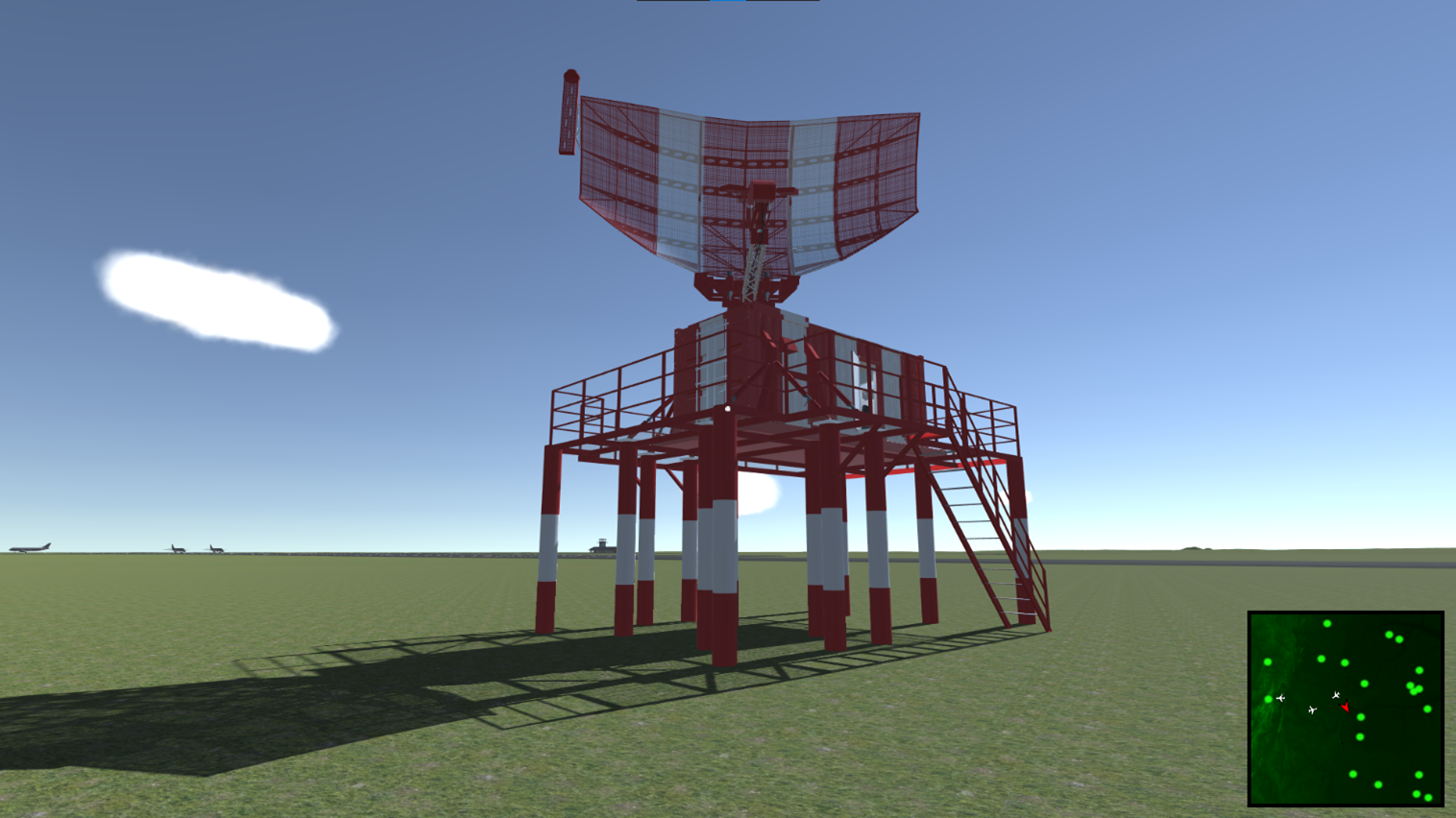
РЛС на территории аэропорта
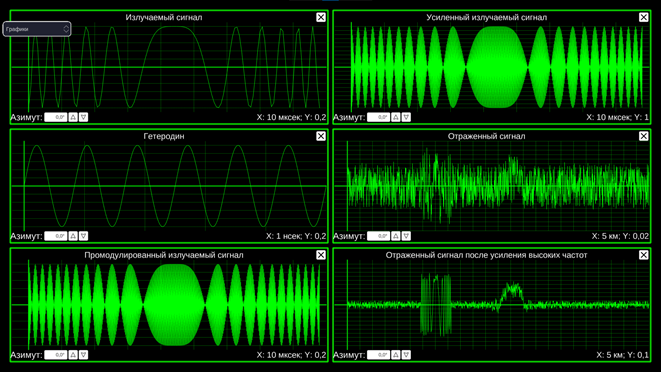
Сигналы РЛС на графиках на разных этапах
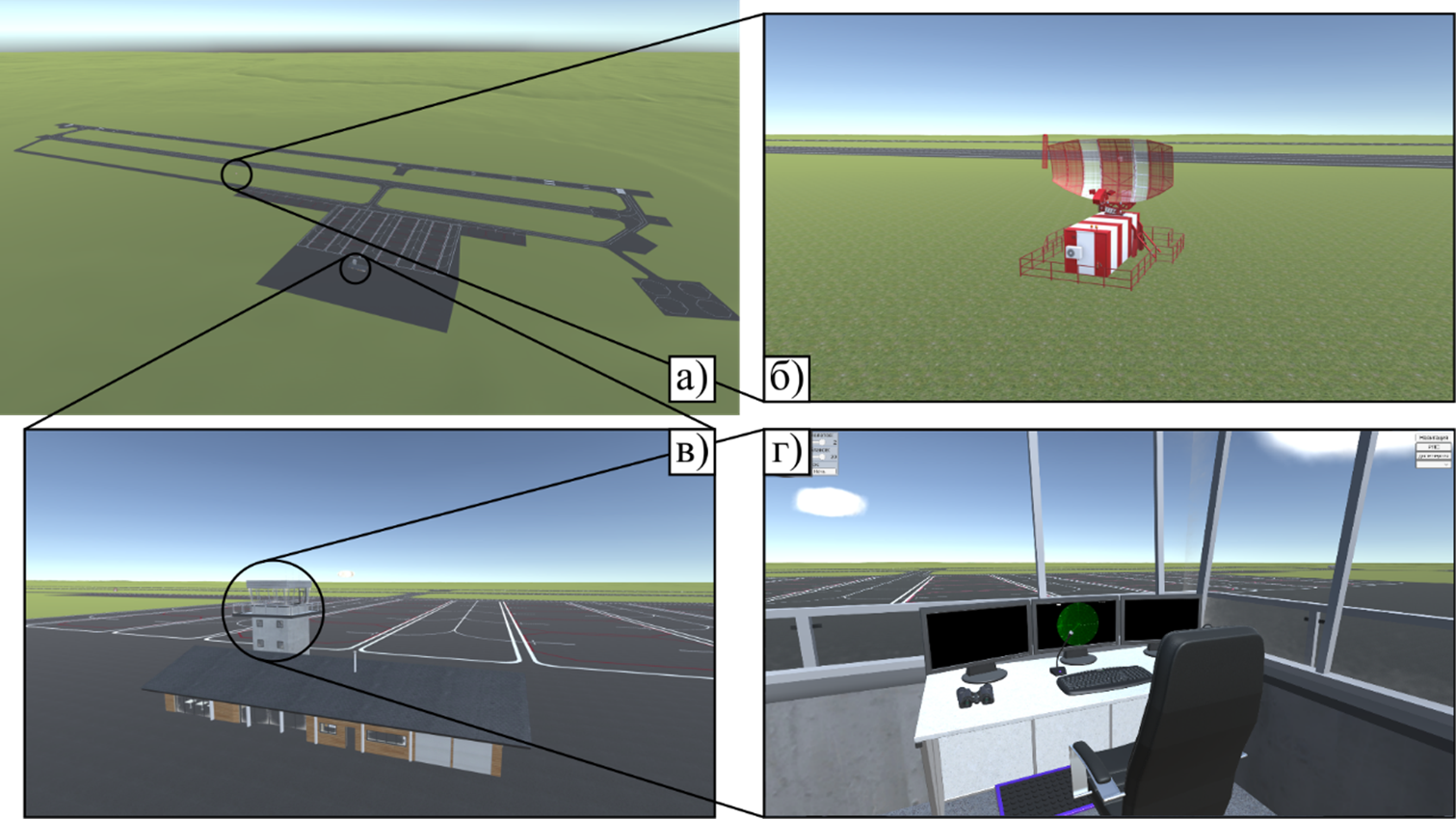
Территория аэропорта и объекты
а) территория аэропорта; б) РЛС
в) здание аэропорта с диспетчерской рубкой; г) вид из диспетчерской рубки на ВПП
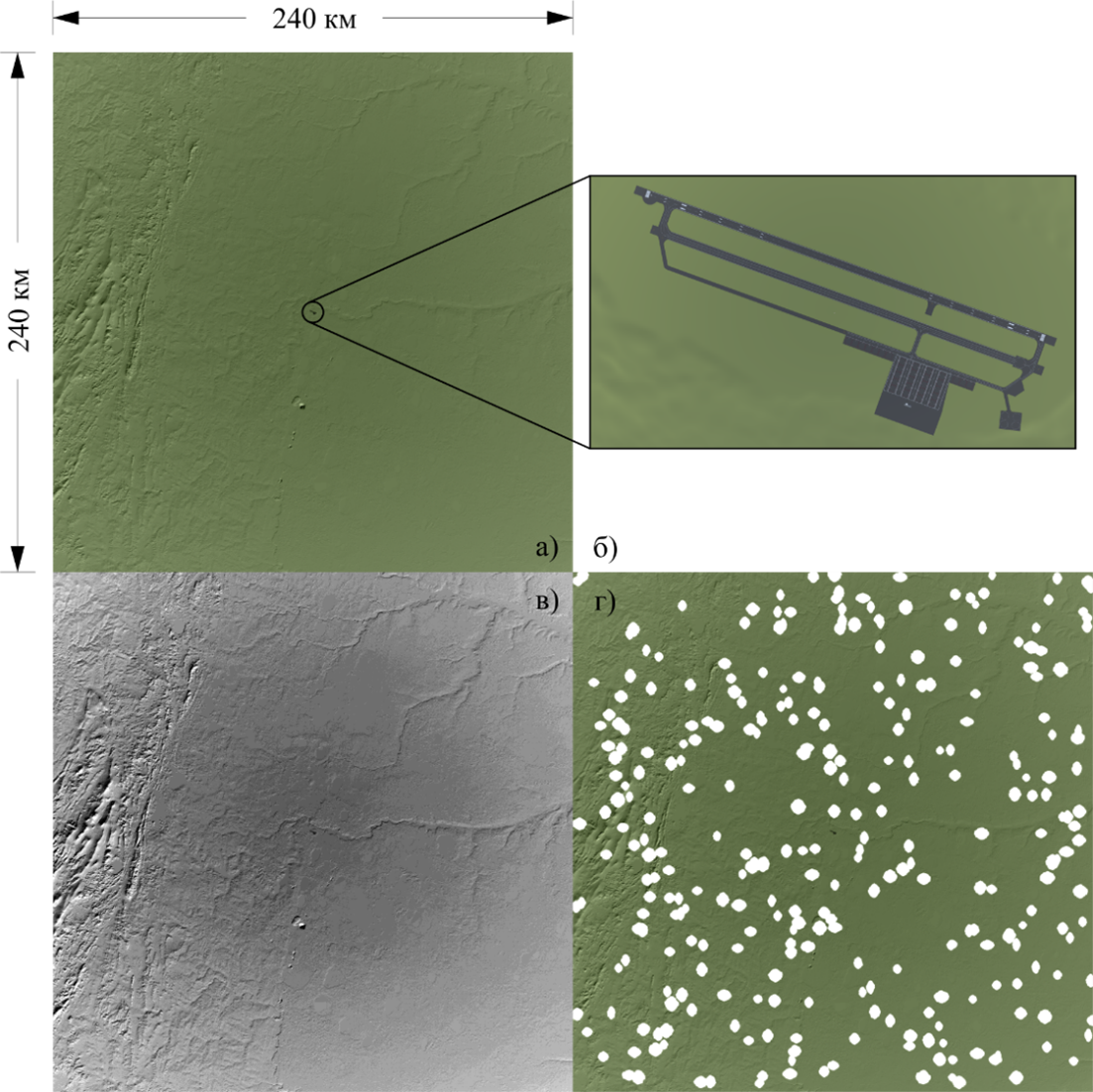
Вид сверху на местность
а) вид сверху на рельеф местности; б) увеличенный вид на аэропорт и ВПП;
в) более контрастное изображение рельефа; г) вид на облака над картой
Облака и рельеф видимые для РЛС
Минимальные системные требования
• ОС: Windows 10
• Процессор: Intel Core 2-ядерный, аналогичный AMD или лучше
• Оперативная память: 4 Гб
• Видеокарта: Nvidia GeForce GT 710, Intel HD Graphics 630 или лучше
• Место на диске: 1 Гб
Детали
| Варианты комплектаций | Бессрочная лицензия на 10 рабочих мест, Подписка на 1 год на 10 рабочих мест |
|---|
Видео-демонстрация