
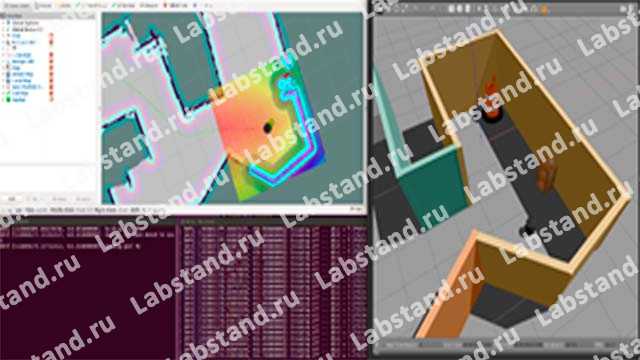
Программно-аппаратный комплекс для изучения методов оптической навигации в помещении (indoor SLAM)
В данном учебном комплексе решается задача построения карты местности в незнакомом помещении по изображению с камеры (при поддержке или отсутствии дальномеров, опорных источников сигнала и т.п.) и дальнейшая навигация робота в рамках помещения. Данный учебный комплекс содержит в своем составе специализированное программное обеспечение, а также физический макет моделируемого помещения в виде лабиринта. В качестве подвижного […]

Программно-аппаратный комплекс «Отработка навигации и управления движущегося объекта вне помещения с использованием нейронных сетей»
В данном учебном комплексе решаются основные подзадачи навигации, встающие перед наземными системами автоматического управления (например, автопилот автомобиля или наземного робота) в открытом, преимущественно городском пространстве с рассеянным освещением (например, на улице): распознавание дорожных знаков, распознавание препятствий и т.п. Данный аппаратно-программный учебный комплекс содержит в своем составе специализированное программное обеспечение, а также виртуальный и физический макет […]

Программно-аппаратный комплекс «Ориентация летающего объекта на местности с использованием SLAM методов»
В данном учебном комплексе решается блок задач, возникающих при навигации на открытом или закрытом пространстве при управлении летающим объектом (в данном случае – дроном): составление карты местности, нахождение на ней ориентиров, само позиционирование и т.п. Данный аппаратно-программный учебный комплекс содержит в своем составе специализированное программное обеспечение, а также физический экземпляр объекта управления в виде малогабаритного […]

Программно-аппаратный комплекс «Распознавание и классификация объектов, контроль качества продукции с помощью машинного обучения»
В данном примере рассматривается работа с объектами на ленте конвейера: распознавание и позиционирование объекта на ленте с помощью камер, нахождение дефектов объекта и т.п. Данный аппаратно-программный комплекс состоит из программного обеспечения, предназначенного для получения синтетически сгенерированных изображений продукции на конвейерной ленте в виртуальном пространстве, приближенном к реальному. Полученные в виртуальной студии изображения могут быть использованы […]

Лабораторный комплекс «Машинное обучение для управления промышленными роботами и мехатронными объектами»
В рамках данной задачи рассматриваются основные примеры применения технологий распознавания и классификаций в промышленном процессе с применением нейросетей и нечёткой логики. Сюда входит: классификация объекта по его составу, поиск оптимального состава, задача управления манипуляторами стенда и т.п. В данном примере рассматривается работа с объектами на ленте конвейера: распознавание и позиционирование объекта на ленте с помощью […]

Лабораторный комплекс «Визуальная обработка и управление движением с помощью машинного зрения и технологий ИИ»
Лабораторная установка предназначена для проведения практических занятий по контролю обработки изображений и управления движением, а также для решения простейших задач искусственного интеллекта. Простой интерактивный пользовательский интерфейс дает студентам возможность ознакомиться с алгоритмами обработки изображений, включая обнаружение краев, сопоставление с образцом, и т.д., а также применять эти алгоритмы для нахождения открытого пути в лабиринте. Кроме того, […]

Лабораторный комплекс «Моделирование и управление дорожным движением с помощью машинного обучения»
Исследовательский лабораторный комплекс предназначен для создания цифровых двойников узлов дорожной сети в целях проведения имитационного моделирования дорожной обстановки и отработки мер по оптимизации параметров участка. Программное обеспечение содержит в своём составе средства для моделирования потока дорожного движения с последующим захватом синтезированного изображения дорожной обстановки и дальнейшей его обработки посредством технологий свёрточных нейронных сетей. Полученные изображения […]

Виртуальный учебный комплекс «Распознавание и классификация объектов с помощью сверточных нейронных сетей»
Данная лаборатория позволяет отработать азы построения, обучения и настройки нейронных сетей на базе архитектур: Yolo и R-CNN. Виртуальный комплекс содержит в себе виртуальную площадку-песочницу, позволяющую синтезировать сцены с различным наполнением объектами, а также варьируемыми параметрами освещения и камеры. С помощью пошагового обучения на простых характерных случаях пользователь может отработать основные этапы в создании обучении и […]

Виртуальный учебный комплекс «Распознавание рукописных символов и работа с внешними датасетами»
Данная лаборатория позволяет отработать азы построения, обучения и настройки сверточных нейронных сетей на базе реальных датасетов. Виртуальный комплекс содержит в себе встроенные инструменты для работы с нейронными сетями на языке Python или C#, а также тестовый набор данных для обучения и тестирования нейронной сети. С помощью пошагового обучения на тренировочных данных пользователь может отработать основные […]

Виртуальный учебный комплекс «Применение пакета TensorFlow в игровых задачах»
Данная лаборатория позволяет изучить и закрепить азы работы с платформой машинного обучения TensorFlow на виртуальных площадках-песочницах. В данном комплексе отрабатывается принцип обучения с подкреплением. Программный комплекс предоставляет интерактивную среду, включающую проектирование и настройку параметров нейросети, программирование поведения агентов и окружающей среды, визуализацию процесса обучения, сбор экспериментальных данных и симуляцию задачи. Учебный комплекс состоит из следующих […]
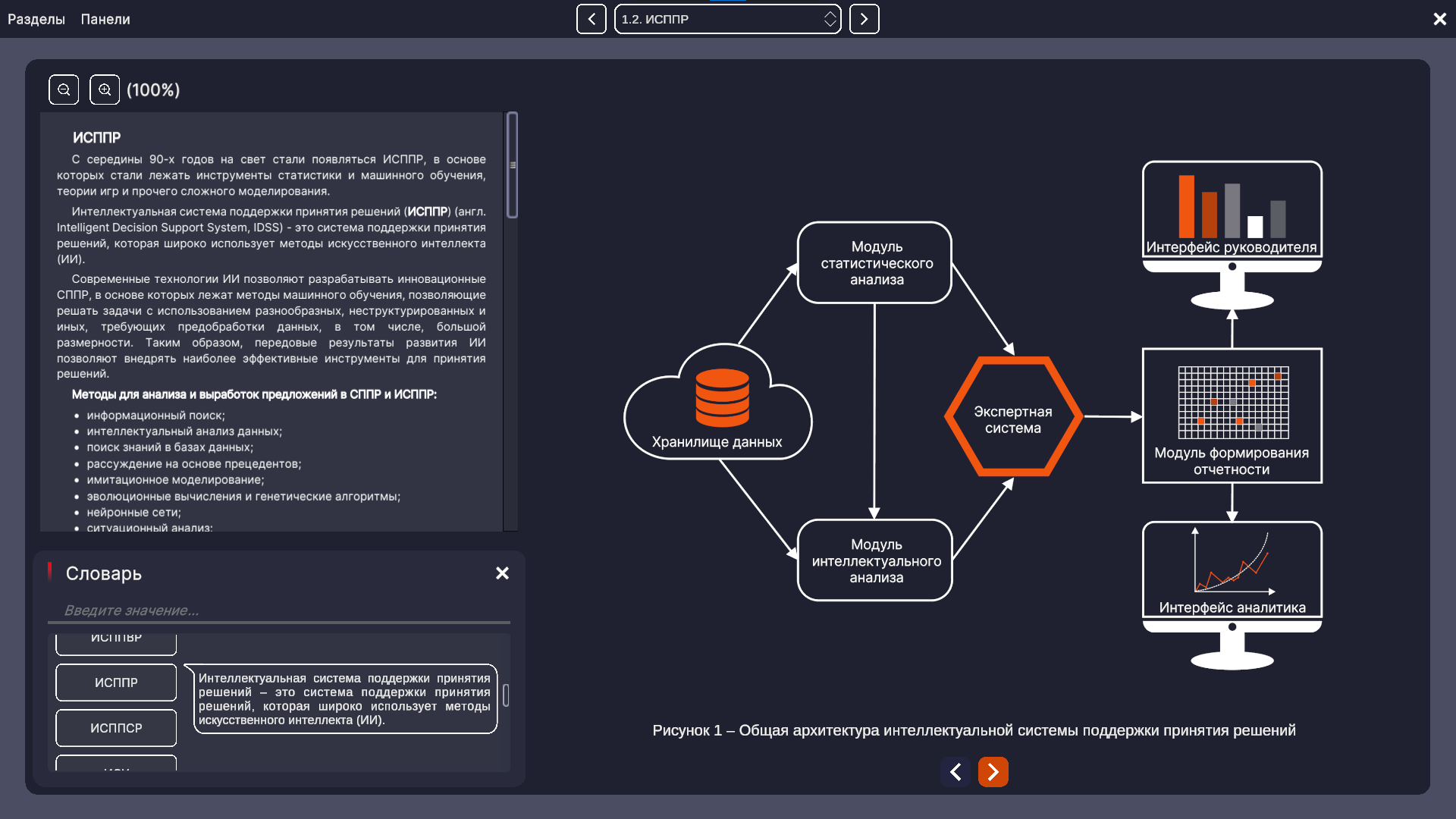
Виртуальный учебник «Интеллектуальные системы поддержки принятия решений» ИИ-ТЕОР-ИСППР
Виртуальный учебник предназначен для демонстрации и изучения основных понятий и принципов работы и построения интеллектуальных системы поддержки принятия решений (ИСППР). Виртуальный учебник предоставляет пользователю виртуальную среду с достоверным описанием основных понятий ИСППР, машинного обучения, анализа данных и Big Data, демонстрирует модели и методы теории принятия решений, технологии принятия решений, примеры применения ИСППР в сферах жизни […]
Виртуальный учебник «Машинное обучение»
Виртуальный учебник «Машинное обучение» предназначен для демонстрации и изучения основных понятий и принципов работы машинного обучения, а также для знакомства с принципами реализации нейронных сетей. Виртуальный учебник предоставляет пользователю виртуальную среду с достоверным описанием основных понятий машинного обучения, демонстрирует походы к предварительной обработке данных и их визуализации, предоставляет информацию об основных задачах машинного обучения и […]

Учебно-лабораторный стенд «Применение нейросети в системах СКУД» ИИ-СКУД
Комплект «Построение СКУД на основе распознавания лиц пользователей» должен обеспечить формирование и развитие компетенций, обозначенных в стандартах ФГОС 3+ по специальности 10.05.02 «Информационная безопасность телекоммуникационных систем», 10.05.01 «Компьютерная безопасность», 10.05.03 «Информационная безопасность автоматизированных систем», а также по направлению подготовки бакалавров 10.03.01 «Информационная безопасность». С целью формирования и развития указанных компетенций с помощью комплекта учебного оборудования […]

Виртуальный учебный комплекс «Прогнозирование характеристик и генерация параметров построения 3D модели лопастного винта с помощью нейронных сетей»
Данный комплекс предназначен для отработки азов построения, обучения и настройки нейронных сетей. Комплекс позволяет загружать подготовленный датасет таблицы соответствий параметров с характеристиками. После обучения нейронной сети комплекс позволяет прогнозировать характеристики при определенных параметрах, а также генерировать параметры согласно установленным характеристикам.

Виртуальная лаборатория изучения больших языковых моделей
Данная лаборатория представляет собой программно-аппаратный учебный комплекс, предназначенный для обучения специалистов и исследователей по работе с большими языковыми моделями (LLM) в локальном оффлайн режиме с локальным вычислительным узлом для обучения и исполнения программной части комплекса. Структура комплекса: Комплекс включает рабочую станцию-сервер со специализированными ускорителями для исполнения больших языковых моделей и несколько тонких клиентов для работы […]
Виртуальный учебный комплекс «Основы искусственного интеллекта»
Виртуальный лабораторный комплекс «Основы искусственного интеллекта» с помощью трехмерной графики и анимации предоставляет исчерпывающее представление о фундаментальных принципах и концепциях в области искусственного интеллекта. Программное обеспечение включает в себя обширный набор виртуальных сцен, обеспечивающих интерактивное изучение в различных режимах. Комплексная интерактивная демонстрация, реализованная в программном обеспечении, предоставляют возможность детального изучения основополагающих концепций ИИ, таких как […]

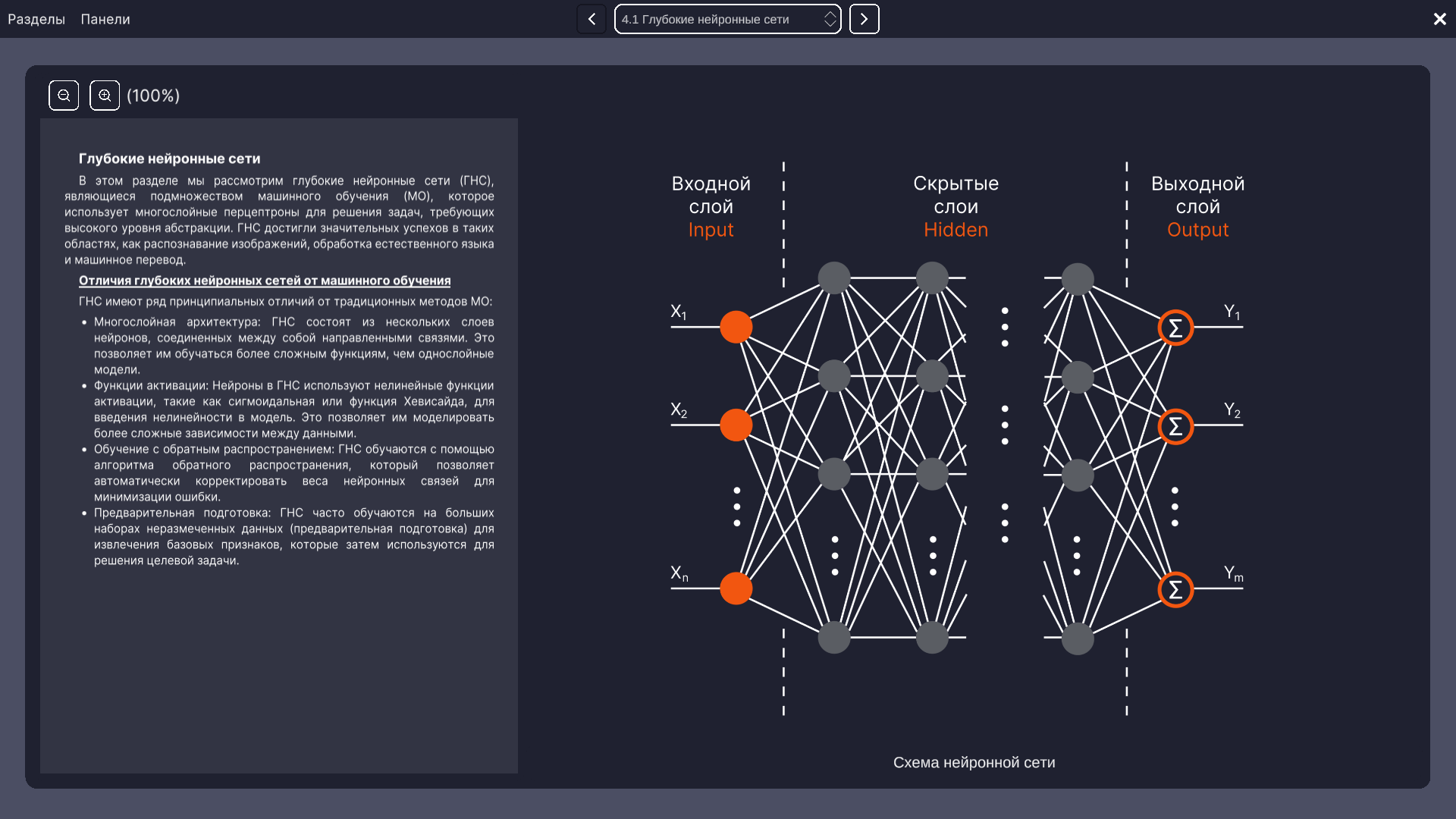
Виртуальный учебный комплекс «Основы обучения и применения нейронной сети»
Виртуальный лабораторный комплекс «Основы обучения и применения нейронной сети» с помощью трехмерной графики и анимации предоставляет исчерпывающее представление об основах функционирования нейронных сетей. Программное обеспечение включает в себя обширный набор виртуальных сцен, обеспечивающих интерактивное изучение в различных режимах. Комплексная интерактивная демонстрация, реализованная в программном обеспечении, позволяет детально ознакомиться с ключевыми принципами обучения нейронных сетей, такие […]

Виртуальный учебный комплекс «Основы сверточных нейронных сетей»
Виртуальный лабораторный комплекс «Основы сверточных нейронных сетей» с помощью трехмерной графики и анимации предоставляет исчерпывающее представление об основах функционирования и работы сверточных нейронных сетей. Программное обеспечение включает в себя обширный набор виртуальных сцен, обеспечивающих интерактивное изучение в различных режимах. Комплексная интерактивная демонстрация, реализованная в программном обеспечении, позволяет детально ознакомиться с ключевыми принципами работы работы и […]
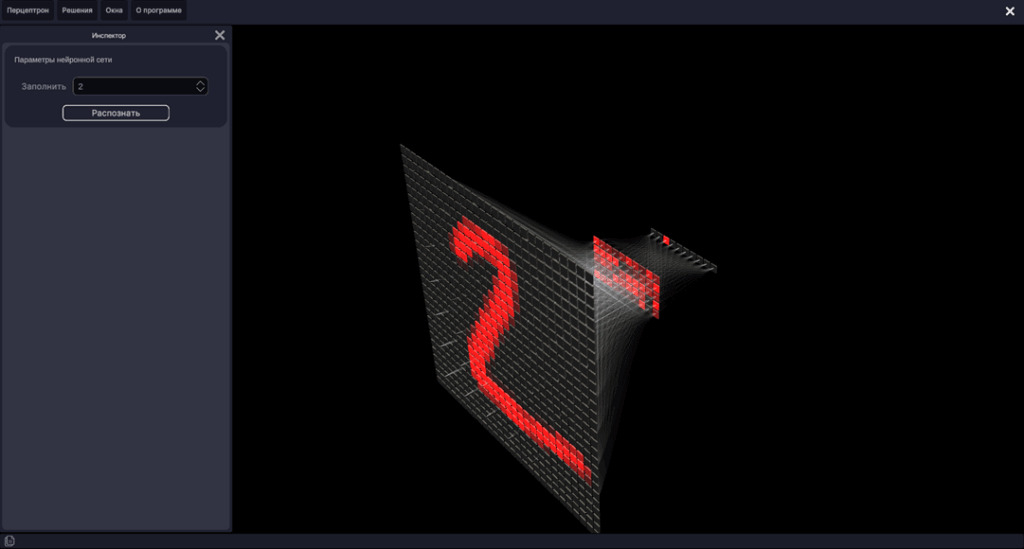
Виртуальный тренажер «Основы нейросетей» ИИ-ТРЕН-ПЕРСЕПТРОН
Предназначен для изучения принципов работы многослойного персептрона (MLP). Тренажёр позволяет пользователям визуализировать архитектуру нейронной сети, экспериментировать с ее обучением, включая метод обратного распространения ошибки и ручную настройку параметров, а также тестировать сеть на классических задачах вроде операции XOR и распознавания символов. Приложение содержит следующий функционал: Образовательный Предоставляет интуитивно понятную и визуальную среду для изучения базовых […]
Лабораторный комплекс «Беспилотный трамвай»
В данном модуле решаются основные подзадачи навигации, встающие перед железнодорожным транспортом беспилотного управления (например, беспилотный трамвай) в открытом, преимущественно городском пространстве с рассеянным освещением (например, на улице): распознавание дорожных знаков, распознавание препятствий, людей и т.п. Данный аппаратно-программный комплекс содержит в своем составе специализированное программное обеспечение, а также виртуальный и физический макет моделируемой местности, в рамках […]
Лабораторный комплекс «Беспилотный автомобиль»
В данном модуле решаются основные подзадачи навигации, встающие перед автомобильным транспортом беспилотного управления (например, беспилотный автобус) в открытом, преимущественно городском пространстве с рассеянным освещением (например, на улице): распознавание дорожных знаков, распознавание препятствий, дорожного направления, людей и т.п. Данный аппаратно-программный комплекс содержит в своем составе специализированное программное обеспечение, а также виртуальный и физический макет моделируемой местности, […]
Лабораторный комплекс «Модули автономных систем»
В данном комплексе реализуются модульные лабораторные работы для автономных систем, которые позволяют отработать навыки программирования с целью изучения беспилотных технологий и их последующего взаимодействия. Лабораторные работы ориентированы на сборку полноценных систем из базовых блоков, а также с поддержкой дополнительных модулей ориентирования в пространстве в одной горизонтальной плоскости. Модуль сенсоров восприятия: блок стереокамер с лидаром (360°), […]