Описание
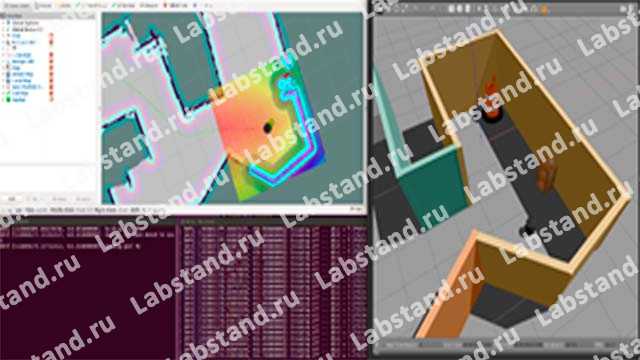
В данном учебном комплексе решается задача построения карты местности в незнакомом помещении по изображению с камеры (при поддержке или отсутствии дальномеров, опорных источников сигнала и т.п.) и дальнейшая навигация робота в рамках помещения.
Данный учебный комплекс содержит в своем составе специализированное программное обеспечение, а также физический макет моделируемого помещения в виде лабиринта.
В качестве подвижного объекта выступает автономный роботизированный объект на подвижном основании, оснащенный оптическими камерами и дополнительными датчиками.
Учебная система позволяет отработать алгоритмы на виртуальной копии окружения, которая может быть перестроена с помощью встроенного редактора.
Виртуальный объект управления содержит эквивалентную имитацию физической камеры и предназначен для облегчения процесса калибровки алгоритмов, а также безопасности испытаний объекта.
Сигналы с виртуальной камеры могут быть интерпретированы внешним ПО как поток с реальной камеры и использованы в рамках решения задач навигации.
Аналогично может быть изменена конфигурация лабиринта на физическом макете.
Полученные алгоритмы и отработанные параметры затем могут быть перенесены на реальный модельный объект для проведения испытаний.