
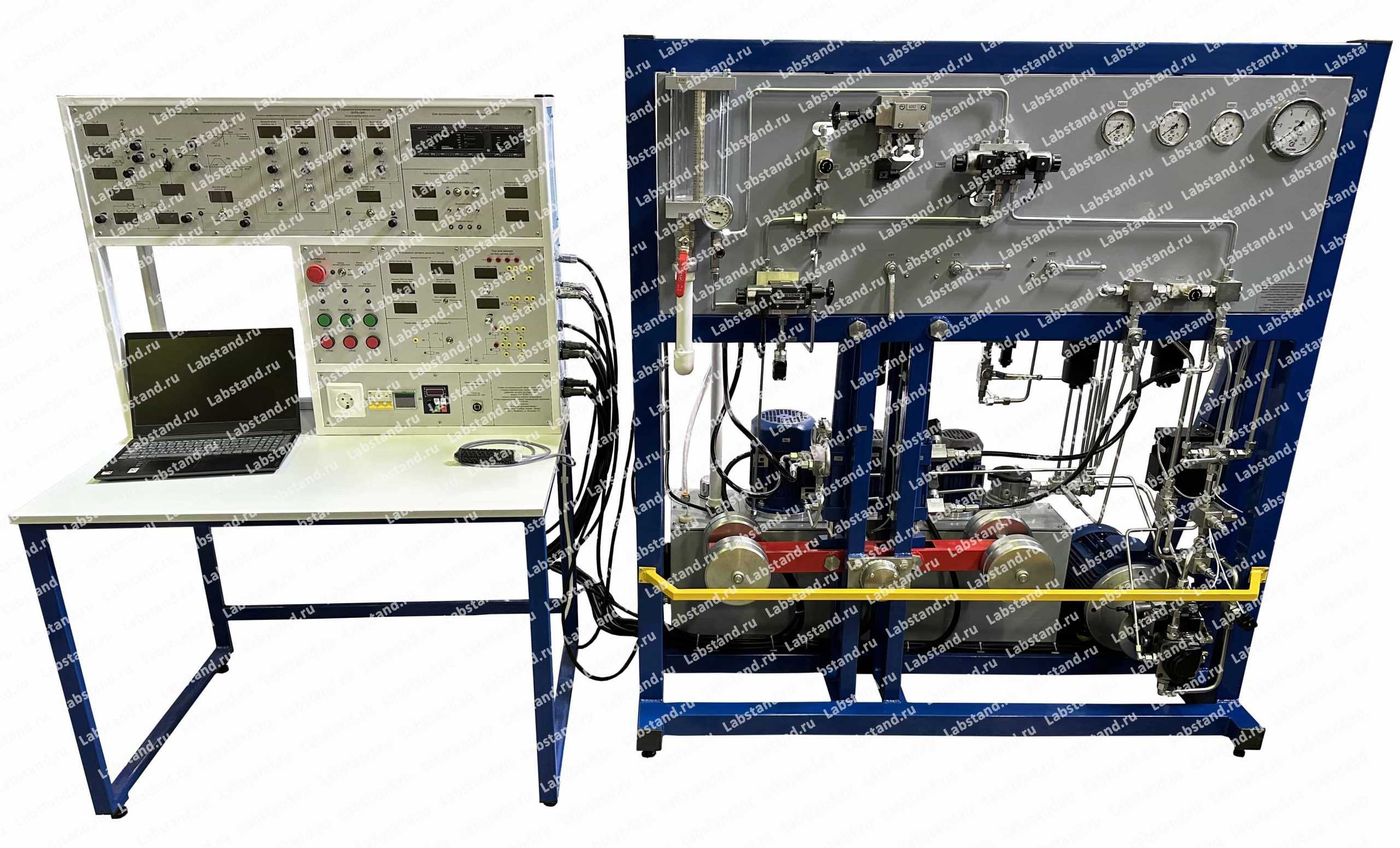
Учебно-исследовательский комплекс «Электрогидравлические следящие приводы — сравнение способов регулирования» СГУ-ЭГСП-ССР-016

Цена не включает в себя транспортные расходы и пуско-наладочные работы.
** В связи со сложностью поставок многих комплектующих, цену на товар необходимо уточнять!
Индивидуальный подход
Доставка по РФ и СНГ
Гарантия от производителя
Пуско-наладка при необходимости
Предлагаем заказать учебное оборудование в наличии со склада!
Сопутствующая учебная техника и пособия:



Описание
Учебно-исследовательский комплекс предназначен для проведения 46 учебно-исследовательских и лабораторных занятий по курсам: «Теория автоматического управления», «Программирование промышленных контроллеров», «Цифровые системы управления гидроприводами», «Теория автоматического управления», «Основы гидропривода», «Элементы гидропривода», «Гидропривод и гидроавтоматика», «Объемные гидроприводы», «Объемные гидромашины», «Средства электроавтоматики в гидро и пневмосистемах».
Учебно-исследовательский комплекс позволяет осуществлять переключение между различными способами управления приводом: изучать следящие системы с дроссельным регулированием с аналоговым и цифровым управлением и следящие гидроприводы с объемным регулированием для проведения сравнительных исследований.
Комплекс состоит из двух модулей. Модули выполнены в виде рамных конструкций из металлического профиля. Оборудование смонтировано на рамных конструкциях.
Модуль «Электрогидравлические следящие приводы — сравнение способов регулирования» содержит насосную станцию с регулируемым насосом с реверсивной подачей с пропорциональным электрическим управлением, предназначенную для питания гидравлического следящего привода возвратно-поступательного действия и гидравлические элементы управления и коммутации системы.
Для сравнения способов регулирования с помощью системы коммутации схемы шаровыми кранами применен пропорциональный дросселирующий гидрораспределитель для получения системы дроссельного управления. В этом режиме регулируемый насос с помощью системы управления выводится в режим постоянной производительности или в режим системы постоянного давления на усмотрение учащихся. При изучении объемного способа регулирования дросселирующий распределитель в управлении не участвует.
Задача следящего привода состоит в отработке заданного перемещения выходного звена привода, соответствующего входному сигналу. Датчик перемещения связан с выходным звеном привода и предназначен для измерения величины перемещения для организации электрической обратной связи привода.
В качестве нагрузки следящего привода модуль содержит качающуюся в вертикальной плоскости балку. Указанный механизм позволяет создавать инерционную уравновешенную нагрузку на привод при установке на нее дополнительных грузов или постоянную весовую нагрузку совмещенную с инерционной. Гидроцилиндр-нагружатель, установленный в качестве противодействующего следящему приводу, позволяет создавать постоянную нагрузку при минимизации инерционной нагрузки.
Гидравлическая схема собрана с помощью металлических трубопроводов и рукавов высокого давления и не требует какой-либо досборки при проведении лабораторных работ. Управление схемой для выполнения каждой из указанных в перечне лабораторных работ осуществляется с помощью дросселей и шаровых кранов.
Измерительная часть стенда позволяет измерять перемещение привода, давление рабочей жидкости в различных точках гидросистемы, регистрировать зависимости параметров гидросистемы от времени.
Модуль системы управления содержит блок цифрового управления в виде промышленного контроллера, через который осуществляется замыкание главной обратной связи привода и управление приводом. Учащиеся осваивают написание соответствующих программ управления и выполняют экспериментальное исследование привода. Кроме цифрового управления применен блок аналогового управления для сравнения способов между собой.
Статические параметры настраиваются с пульта управления и выводятся на информационные табло. Параметры, изменяющиеся непрерывно, регистрируются на компьютере. Программа обработки данных и управления стендом имеет интерфейс на русском языке.
Электропитание – трехфазная сеть 380 В, 50Гц, потребляемая мощность не более 4 кВт.
Номинальное давление эксплуатации 8 МПа.
Масса не более 500 кг.
Габариты не более 2800х750х1850 мм.
Комплектация
– модуль «Электрогидравлические следящие приводы -сравнение способов регулирования»;
– модуль системы управления;
– рабочая жидкость;
– ноутбук;
– описание лабораторных работ;
– руководство по эксплуатации;
– паспорт.
Состав
Состав модуля «Электрогидравлические следящие приводы -сравнение способов регулирования»:
– рамная конструкция;
– бак гидравлический;
– насосный агрегат с реверсивной подачей рабочей жидкости с электрическим дистанционным управлением;
– насосный агрегат постоянной производительности;
– гидроаккумулятор;
– система фильтрации;
– обратный клапан;
– кран шаровой (5 шт.);
– датчик давления (6 шт.);
– кран шаровой трёхходовой (3 шт.);
– распределитель разгрузки насоса;
– дроссель нагружения насоса;
– мерная емкость;
– дроссель (2шт.);
– предохранительный клапан (6 шт.);
– пропорциональный распределитель;
– манометр (4 шт.);
– преобразователь частоты;
– гидроцилиндр привода;
– гидроцилиндр-нагружатель;
– съемная массовая нагрузка;
– датчик перемещения;
Состав модуля системы управления:
– рамная конструкция;
– столешница;
– блок управления гидравлическим пропорциональным распределителем;
– электронный блок управления насосной станцией;
– блок управления распределителем разгрузки;
– блок индикации для датчиков давления;
– блок управления реверсивным насосом;
– блок реле давления;
– блок программируемого логического контроллера;
– электрический блок питания;
– блок компьютерного управления;
– электронный секундомер с ручным управлением;
– комплект проводов со штекерами.
Лабораторные работы
Лабораторные работы по обучению основам программирования ПЛК:
1. Изучение среды программирования ПЛК.
2. Основы алгебры логики. Реализация логических функций с помощью программируемого логического контроллера (ПЛК).
3. Применение логических операций при управлении исполнительным механизмом. Управление от нескольких входных сигналов.
4. Реализация электрических схем «с самоподхватом» с помощью программируемого логического контроллера.
5. Реализация функции задержки по времени на ПЛК.
6. Обработка аналоговых сигналов на ПЛК.
Лабораторные работы по ознакомлению со схемой:
1. Экспериментальное определение характеристик нерегулируемого насоса при его работе совместно с предохранительным клапаном.
2. Экспериментальное исследование характеристики дросселя с обратным клапаном.
3. Изучение блоков управления пропорциональным гидрораспределителем. Изучение электрической системы управления гидроприводом возвратно-поступательного действия с помощью распределителя с пропорциональным электрическим управлением.
4. Управление гидроприводом возвратно-поступательного действия с помощью распределителя с пропорциональным электрическим управлением в режиме ручного управления.
5. Изучение схемы создания нагрузки на привод возвратно-поступательного действия и экспериментальная апробация действий.
6. Экспериментальное исследование характеристик аккумулятора.
7. Разработка схем управления насосно-аккумуляторной гидростанции при работе с насосом постоянной производительности. Автоматическое поддержание требуемого уровня давления в аккумуляторе при работе совместно с потребителем.
Лабораторные работы по изучению и исследованию насосной станции с регулируемым насосом и следящего гидропривода с объемным регулированием:
1. Изучение электронных блоков управления насосом с пропорциональным управлением.
2. Изучение схемы гидропривода с реверсивным регулируемым насосом с пропорциональным электрическим управлением и исполнительным механизмом возвратно-поступательного действия. Реализация схемы на стенде.
3. Изучение и настройка схемы управления реверсивного регулируемого насоса с пропорциональным электрическим управлением. Экспериментальное получение характеристик регулируемого насоса.
4. Изучение программного обеспечения для получения характеристик гидропривода с применением компьютера.
5. Экспериментальное получение механической характеристики гидропривода с реверсивным регулируемым насосом с пропорциональным электрическим управлением и исполнительным механизмом возвратно-поступательного действия. Определение КПД гидропривода.
6. Понятие обратной связи гидропривода с реверсивным регулируемым насосом с пропорциональным электрическим управлением и исполнительным механизмом возвратно-поступательного действия по положению. Работа гидропривода в режиме следящего привода с замкнутой обратной связью при ручном управлении.
7. Изучение программирования системы управления насосом с помощью ПЛК для получения различных характеристик насосной станции:
– характеристика постоянного давления;
– характеристика LS–регулятора;
– пропорциональное управление расходом.
9. Разработка схем управления насосно-аккумуляторной гидростанции. Автоматическое поддержание требуемого уровня давления в аккумуляторе при работе насоса в режиме характеристики постоянного давления совместно с потребителем.
10. Управление следящим гидроприводом объемного регулирования с замкнутой обратной связью при задании входного сигнала с компьютера и управлением электронной аналоговой системой управления. Позиционирование гидропривода. Исследование переходного процесса привода по перемещению.
11. Управление следящим гидроприводом объемного регулирования с замкнутой обратной связью при задании входного сигнала с компьютера и управлением электронной аналоговой системой управления. Гармонический входной сигнал. Изучение частотных характеристик привода объемного регулирования с обратной связью по положению.
12. Управление с помощью ПЛК. Изучение программного обеспечения для управления насосом в режиме работы в следящем гидроприводе. Позиционирование гидропривода. Исследование переходного процесса привода по перемещению.
13. Управление с помощью ПЛК. Изучение программного обеспечения для управления насосом в режиме работы в следящем гидроприводе. Гармонический входной сигнал. Изучение частотных характеристик привода объемного регулирования с обратной связью по положению.
14. Исследование устойчивости привода объемного регулирования с обратной связью по положению.
Лабораторные работы по исследованию следящего дроссельного гидропривода с аналоговым управлением:
1. Изучение характеристик пропорционального гидрораспределителя. Построение расходной характеристики пропорционального гидрораспределителя в зависимости от величины сигнала управления.
2. Понятие обратной связи гидропривода дроссельного регулирования с пропорциональным электрическим управлением и исполнительным механизмом возвратно-поступательного действия по положению. Работа гидропривода в режиме следящего привода с замкнутой обратной связью при ручном управлении.
3. Позиционирование гидропривода с замкнутой обратной связью по положению и управлением электронной аналоговой системой управления. Исследование переходного процесса привода по положению.
4. Позиционирование гидропривода с замкнутой обратной связью по положению и управлением электронной аналоговой системой управления. Гармонический входной сигнал. Изучение частотных характеристик гидропривода.
5. Влияние работы насосной станции с аккумулятором и без него на характеристики гидропривода при гармоническом входном сигнале.
6. Исследование устойчивости гидропривода.
7. Изучение характеристик гидропривода при отказе датчика давления аккумулятора:
– всегда наличие максимального выходного сигнала;
– отсутствие сигнала с датчика.
8. Изучение переходного процесса электрогидравлического следящего привода при работе его в режиме стабилизации и следующих отказах в системе управления:
– обрыв главной обратной связи;
– смещение «нуля» главной обратной связи;
– изменение коэффициента усиления прямой цепи.
9. Изучение частотных характеристик и переходного процесса электрогидравлического следящего привода при работе его в режиме стабилизации при нарушении герметичности поршневого уплотнения.
Лабораторные работы по исследованию следящего дроссельного гидропривода с цифровым управлением:
1. Изучение программирования ПЛК для управления гидравлическим пропорциональным распределителем.
2. Изучение программирования ПЛК для создания системы замыкания обратной связи по перемещению штока гидроцилиндра.
3. Изучение программирования ПЛК для создания системы управления гидроприводом.
4. Позиционирование гидропривода с обратной связью по положению. Исследование переходного процесса привода с обратной связью по положению при ступенчатом входном сигнале при управлении с помощью ПЛК.
5. Задание закона движения гидропривода с обратной связью по положению при управлении с помощью ПЛК.
6. Изучение частотных характеристик гидропривода при управлении с помощью ПЛК.
7. Исследование устойчивости гидропривода при управлении с помощью ПЛК.
8. Изучение характеристик гидропривода при управлении с помощью ПЛК при отказе датчика давления аккумулятора:
– всегда наличие максимального выходного сигнала;
– отсутствие сигнала с датчика.
9. Изучение переходного процесса электрогидравлического следящего привода при работе его в режиме стабилизации и следующих отказах в системе управления при управлении с помощью ПЛК:
– обрыв главной обратной связи;
– смещение «нуля» главной обратной связи;
– изменение коэффициента усиления прямой цепи.
10. Изучение частотных характеристик и переходного процесса электрогидравлического следящего привода при работе его в режиме стабилизации при нарушении герметичности поршневого уплотнения при управлении с помощью ПЛК.