
Отображение 2917–2943 из 8284

Ручная рамка для демонстрации явления электромагнитной индукции
Можно помещать в поле электромагнита. Характеристики: -Количество витков, не менее ……50 -Диаметр рамки, мм …….. 75 ± 10 -Активное сопротивление, Ом, …….4 -Длина ручки, мм ……..300 ± 20

РОБОТИЗИРОВАННЫЙ УЧЕБНЫЙ УНИВЕРСАЛЬНЫЙ КОМПЛЕКС НА БАЗЕ ПРОМЫШЛЕННОГО РОБОТА ESTUN ER10B-900-MI
Комплекс предназначен для обучения программированию робототехнических комплексов, позволяет отлаживать и реализовывать технологию перемещения, загрузки-выгрузки станка с ЧПУ, работу с ПЛК и HMI. Предназначен для проведения демонстрационного экзамена по специальности 15.02.18. Вид товара Робот-манипулятор учебный Количество степеней свободы Штука 6 Максимальная грузоподъемность КГ 1 Класс защиты электрооборудования IP54 Тип монтажа Напольный Тип конструкции Вертикально сочлененный манипулятор […]

РОБОТИЗИРОВАННЫЙ УЧЕБНЫЙ СВАРОЧНЫЙ КОМПЛЕКС НА БАЗЕ ПРОМЫШЛЕННОГО РОБОТА ESTUN ER10B-900-MI
Комплекс предназначен для обучения программированию робототехнических комплексов, позволяет отлаживать и реализовывать технологию роботизированной сварки. Предназначен для проведения демонстрационного экзамена по специальности 15.02.18. Вид товара Робот-манипулятор учебный Количество степеней свободы Штука 6 Максимальная грузоподъемность КГ 1 Класс защиты электрооборудования IP54 Тип монтажа Напольный Тип конструкции Вертикально сочлененный манипулятор Тип приводов Сервопривод переменного тока Тип обратной связи […]

Роботизированный сварочный комплекс на базе промышленного робота KUKA KR8 R1620
Предназначена для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешними устройствами (позиционерами, системой безопасности). Состав: 1. Промышленные роботы и позиционеры: — робот KUKA KR8 — 1 шт.; — контроллер робота KUKA KRC4 KRC4compact — 1 шт.; — пульт управления роботом KUKA smartPAD — 1 шт.; — системной программное обеспечение […]
Роботизированный сварочный комплекс на базе промышленного робота KUKA KR8 R1620
Предназначена для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешними устройствами (позиционерами, системой безопасности). Состав: 1. Промышленные роботы и позиционеры: — робот KUKA KR8 — 1 шт.; — контроллер робота KUKA KRC4 KRC4compact — 1 шт.; — пульт управления роботом KUKA smartPAD — 1 шт.; — системной программное обеспечение […]

Роботизированный сварочный комплекс на базе промышленного робота GSK RH06A3
Позволяет проводить исследования в области сварочных технологий и мехатронных систем, программирования робототехнических сварочных комплексов. Комплекс может реализовывать функции автоматической и полуавтоматической сварки изделий, так же проводить вспомогательные технологические операции. Также подходит для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешними устройствами (позиционером, системой безопасности, технологическим оборудованием). Промышленные роботы и […]

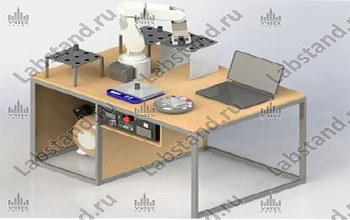
Роботизированный сборочный/сортировочный стенд с компьютерным управлением (РСС-УР)
Предназначен для подготовки профессиональных кадров различных технических специальностей. Модификация 1(перенос цилиндрических и призматических деталей) : — Учебный робот (РОБИН-1Ц USB/ШВП или Робин РСС-1 Сфера USB или УР 3/4 SCARA USB) с компьютерным управлением; — Компьютерные имитаторы робота и сборочного стенда — Ноутбук — Сборочные цилиндрические и призматические элементы — Подиум — CD-R с программным обеспечением, […]
Роботизированный сборочный/сортировочный стенд с компьютерным управлением (РСС-УР)
Предназначен для подготовки профессиональных кадров различных технических специальностей. Модификация 1(перенос цилиндрических и призматических деталей) : — Учебный робот (РОБИН-1Ц USB/ШВП или Робин РСС-1 Сфера USB или УР 3/4 SCARA USB) с компьютерным управлением; — Компьютерные имитаторы робота и сборочного стенда — Ноутбук — Сборочные цилиндрические и призматические элементы — Подиум — CD-R с программным обеспечением, […]
Роботизированный комплекс ульразвукового контроля на базе промышленного робота KUKA KR4 R600 Agilus
Состав: 1. Промышленные роботы и позиционеры: — робот KUKA KR4 R600 Agilus — 1 шт.; — контроллер робота KUKA KRC — 1 шт.; — пульт управления роботом KUKA smartPAD — 1 шт.; — системное программное обеспечение робота KSS 8 — 1 шт.; — комплект кабелей и разъемов для подключения робота и прибора УЗК — 1 […]

Роботизированный комплекс на базе промышленного робота KUKA KR10 R1100 Agilus-2 «Работа с ПЛК и HMI
Позволяет реализовать пятый модуль чемпионата WSR, в котором необходимо запрограммировать программируемый логический контроллер (PLC) и HMI. С помощью системы RFID распознаётся деталь на сортировочном конвейере, при необходимости. Предназначена для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешним технологическим оборудованием. Промышленные роботы и контроллеры: Робот KUKA KR 10 R1100 Agilus-2 […]
Роботизированный комплекс на базе промышленного робота KUKA KR10 R1100 Agilus-2 «Оффлайн программирование — технология контактная
Позволяет реализовать третий модуль чемпионата WSR, в котором необходимо создать цифровой двойник ячейки. Предназначена для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешним технологическим оборудованием. Промышленные роботы и контроллеры: Робот KUKA KR 10 R1100 Agilus-2 Контроллер робота KUKA KR C4 compact Пульт управления роботом KUKA smartPAD2 Системное программное обеспечение […]
Роботизированный комплекс на базе промышленного робота KUKA KR 8 R1620 для выполнения задания «Монтаж и
Позволяет реализовать первый модуль чемпионата WSR, в котором необходимо произвести монтаж и пуско-наладку сварочного комплекса. Также подходит для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешними устройствами (позиционером, системой безопасности, технологическим оборудованием). Промышленные роботы и контроллеры: Робот KUKA KR 8 R1620 Контроллер робота KUKA KRC4 Пульт управления роботом KUKA […]
Роботизированный комплекс на базе промышленного робота KUKA KR 10 R1100 Agilus-2 «Работа с CAM системой
Позволяет реализовать четвёртый модуль чемпионата WS, в котором необходимо создать управляющую программу для робота в CAM-системе, выгрузить программу на контроллер робота. Предназначена для изучения основ промышленной робототехники, способов программирования робота под производственные задачи и взаимодействия с внешним технологическим оборудованием. Промышленные роботы и контроллеры: Робот KUKA KR 10 R1100 Agilus-2 Контроллер робота KUKA KR C4 compact […]
Роботизированный комплекс «Онлайн программирование – загрузка-выгрузка фрезерного станка УФСп-ЧПУ» на базе промышленного робота KUKA KR
Позволяет реализовать второй модуль чемпионата WSR, в котором необходимо запрограммировать робота с пульта. Во время работы реализуется технологическая операция перемещения заготовок на склад, перемещение заготовок со склада в станок, перемещение готового изделия из станка на склад готовых изделий. Также подходит для изучения основ промышленной робототехники, станков с ЧПУ, способов программирования робота и станка и взаимодействия […]
Роботизированный комплекс «Онлайн программирование – загрузка-выгрузка токарного станка СТ200-ЧПУ» на базе промышленного робота GSK RB08A3-1490
Во время работы реализуется технологическая операция перемещения заготовок на склад, перемещение заготовок со склада в станок, перемещение готового изделия из станка на склад готовых изделий. Также подходит для изучения основ промышленной робототехники, станков с ЧПУ, способов программирования робота и станка. Промышленные роботы и станки Робот GSK RB08A3-1490 Контроллер робота GSK-RC Пульт управления роботом GSK Системное […]

Роботизированная сборочная ячейка на базе промышленного робота KUKA KR4 R600
Комплекс предназначен для исследований в области электроприводов, пневмоприводов и мехатронных систем, систем позиционирования, программирования робототехнических комплексов. Комплекс позволяет реализовывать функции автоматической и полуавтоматической сборки и сортировки изделий с применением специализированного программного обеспечения, так же проводить контрольные и вспомогательные технологические операции. Исследовательский комплекс предназначен для проведения исследований по следующим темам: — точность работы сборочного промышленного робота; […]
Разрезные модели пневматических элементов по курсам «Основы пневмопривода», «Автоматизация технологических процессов средствами пневмоавтоматики»
Все разрезные модели и наборы сопровождаются учебным пособием для изучения устройства и принципа действия изучаемых элементов)

Разрезные модели гидравлических элементов
Разрезные модели гидравлических элементов по курсам «Основы гидропривода», «Объемные гидромашины», «Элементы гидропривода», «Теория проектирования гидравлических и электрогидравлических приводов». Все разрезные модели и наборы сопровождаются учебным пособием для изучения устройства и принципа действия изучаемых элементов.

Разрезные модели «Оборудование нефть и газ»
Перечень предлагаемых разрезных моделей:
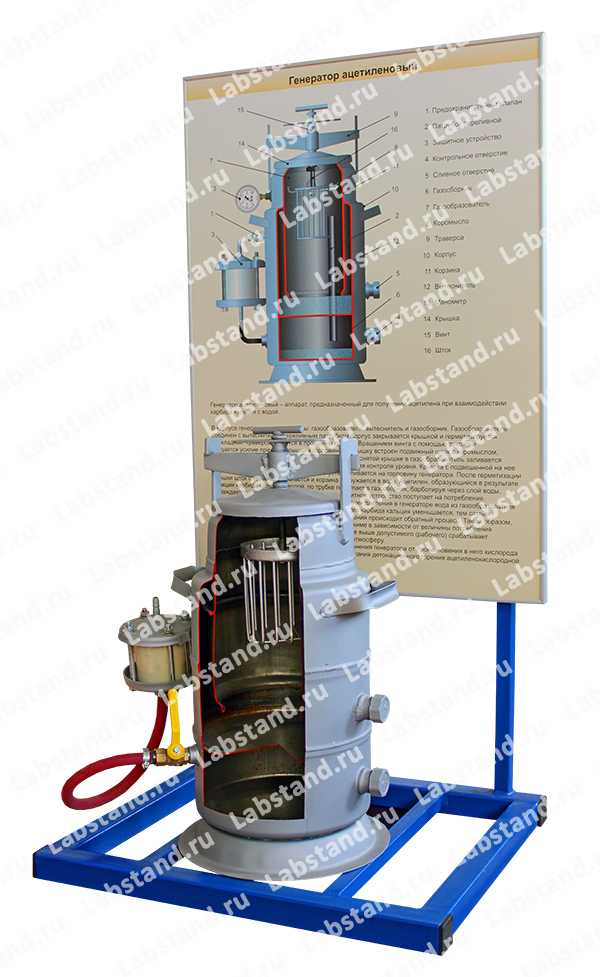
Разрезное изделие «Генератор ацетиленовый»
Разрезное изделие предназначено для проведения практических работ по изучению общего устройства и принципа работы генератора ацетиленового, а также формированию первоначальных навыков по использованию генератора. Описание: Стенд представляет собой натуральный образец ацетиленового генератора, установленного в металлическом основании, окрашенным полимерной износостойкой краской. Стенд оснащен информационной панелью, установленной на металлическом кронштейне. На корпусе генератора выполнены разрезы. Состав: стационарное […]

Разрезное изделие «Блок винтовой пневматической машины»
Назначение: Разрезное изделие предназначено для изучения конструкции винтовых пневматических машин и их составных элементов. Описание: Стенд представляет собой блок винтовой пневматической машины, закрепленный на стационарном металлическом основании, в целях обеспечения учебного процесса на корпусе блока выполнены разрезы. Состав: — стационарное металлическое основание, покрытое порошковой износоустойчивой эмалью не менее, 1шт., — блок винтовой пневматической машины, не […]

Разрезное изделие «Блок V-образной пневматической машины»
Назначение: Разрезное изделие предназначено для изучения конструкции поршневых пневматических машин и их составных элементов. Описание: Стенд представляет собой блок V- образной пневматической машины, закрепленный на стационарном металлическом основании, в целях обеспечения учебного процесса на корпусе машины выполнены разрезы. Состав: — стационарное металлическое основание, покрытое порошковой износоустойчивой эмалью не менее, 1шт., — блок V- образной пневматической […]
Разрезная модель «Осевой компрессор»
Модель позволяет изучить устройство осевого компрессора. Модель включает следующие функционально-конструкционные элементы: • Поворотные лопатки • Лопасти • Диск ротора • Статор • Стапель Модель выполняется из пластика с металлическими болтами для сборки, масштаб модели оговаривается с заказчиком, но готовая модель должна иметь настольное исполнение и занимать не менее 100х200х200 мм
Разрезная модель «Воздушный винт»
Модель позволяет изучить устройство пропеллера. Модель включает следующие элементы: • Лопасти вентилятора • Диск вентилятора • Защитные проставки • Корпус вентилятора Модель выполняется из пластика с металлическими болтами для сборки, масштаб модели оговаривается с заказчиком, но готовая модель должна иметь настольное исполнение и занимать не менее 100х200х200 мм
Разрезная действующая модель «Топливная форсунка турбореактивного двигателя»
Данный учебный комплекс позволяет с помощью действующего разрезной модели изучить устройство и принцип действия топливной форсунки турбореактивного двигателя. Форсунка является частью камеры сгорания турбореактивного двигателя и предназначена для обеспечения стабильного распыления топлива как при низкой подаче, так и при высокой. Существует два типа форсунок: Простая и двойная. Данная разрезная модель иллюстрирует базовую конструкцию двойной форсунки, […]
Разрез тягового синхронного реактивного двигателя гибридного автомобиля
Разрез тягового синхронного реактивного двигателя электромобиля Tesla, выполнены продольный и поперечный разрез статора, извлечен ротор, вместе они закреплены на основании, содержащем цветную графику, иллюстрирующую принцип работы и конструкцию двигателя.
Разрез тягового асинхронного двигателя электромобиля
Разрез тягового асинхронного двигателя электромобиля Tesla, выполнены продольный и поперечный разрез статора, извлечен ротор, вместе они закреплены на основании, содержащем цветную графику, иллюстрирующую принцип работы и конструкцию двигателя.